Sections
Problem
Noise Clouds occur when a GPS device is left recording when stopped, or moving within a small area, such as when at camp or taking a pit stop. GPS inaccuracies may also exaggerate movement within this area. These appear as a messy jumble of Points about a small area. They are undesirable as not only do they result in larger Tracks of meaningless data, but they also add false distance & elevation gain to movement stats.
Procedure to Define a Noise Cloud
Letters/colors correspond to diagram labels.
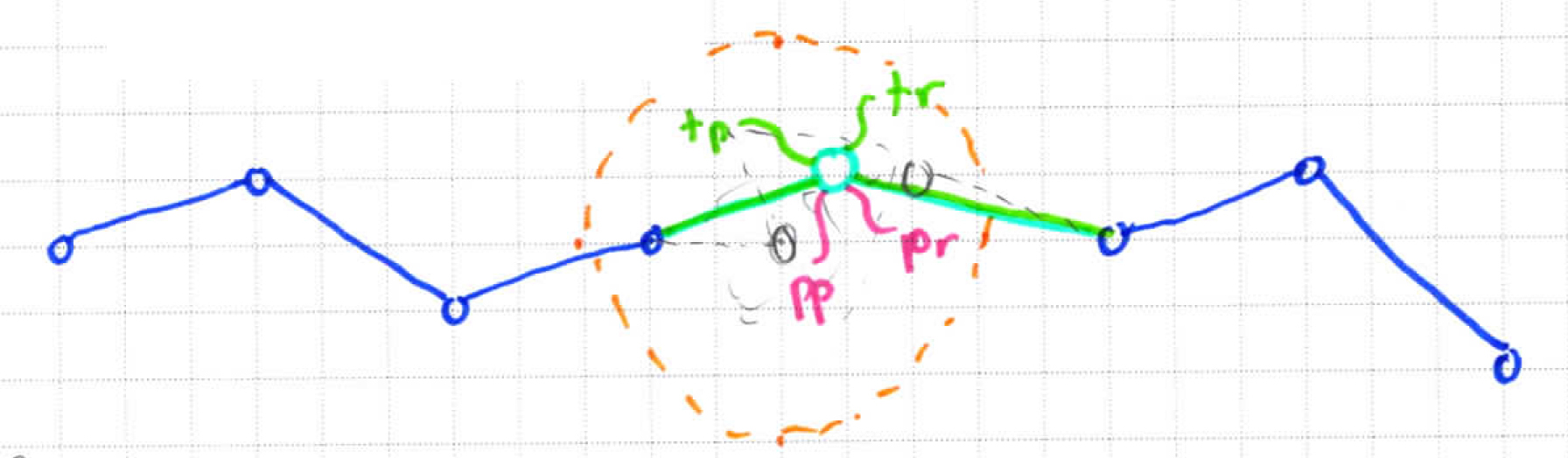
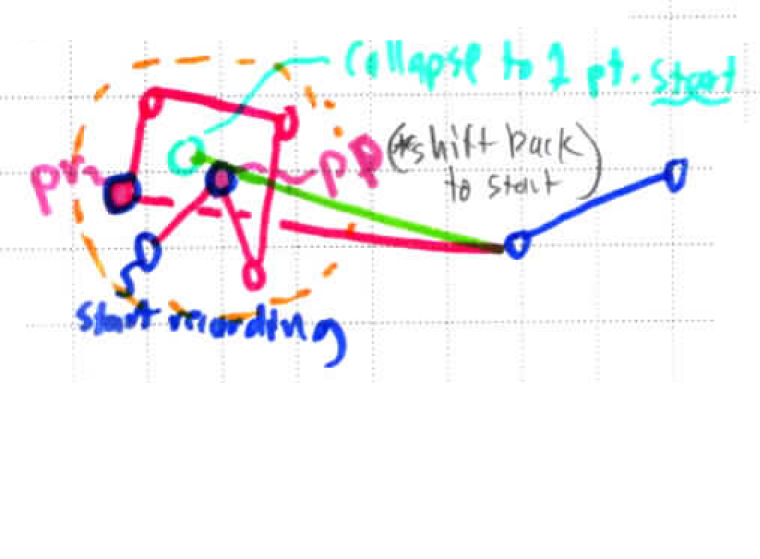
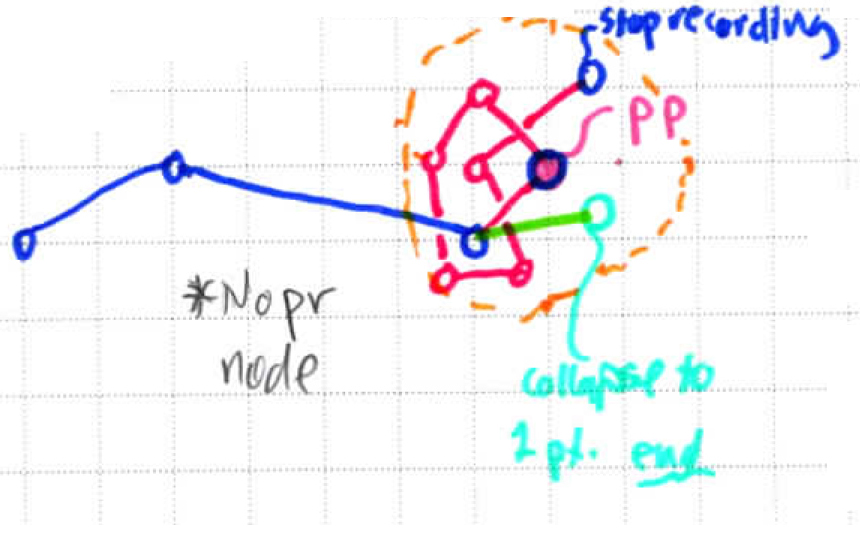
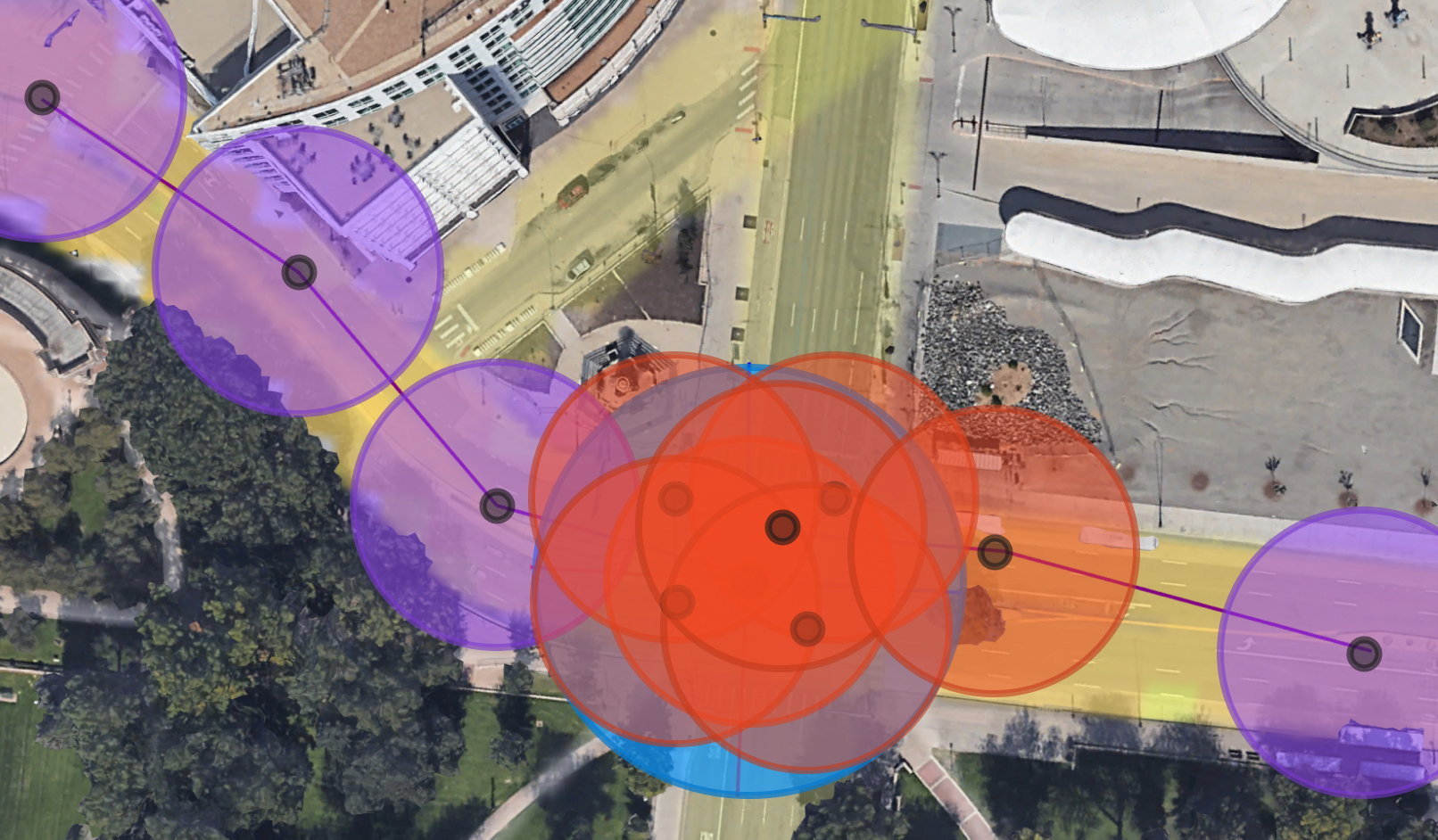
A. Determined to start when speed falls below a threshold (time pause, tp, for point pause, pp)
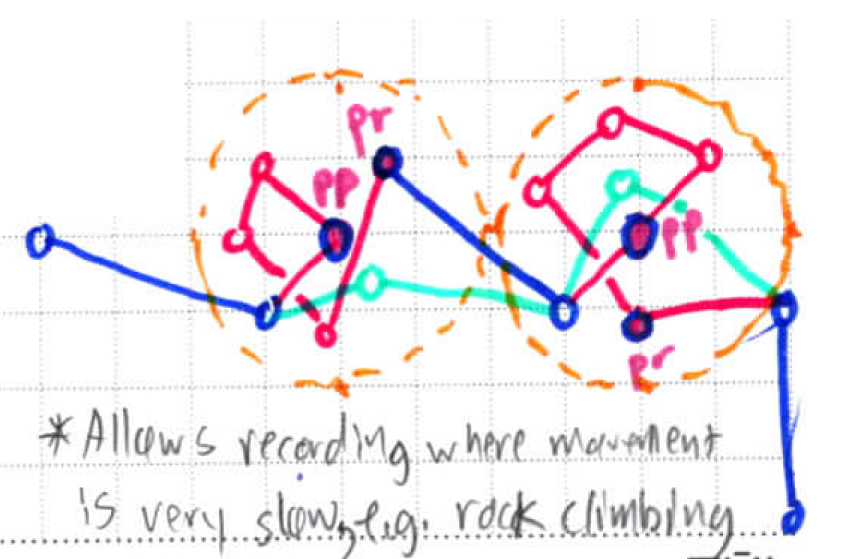
B. Regardless of later point speeds, a cloud is considered to persist when the Points remain within a radial region about the stopped Point, the size of which is determined by a speed threshold.
C. Determined to end when Points leave the radial region about the tp. The last Point still in this region is the time resume, tr, for point resume, pr.
Below is an example of a noise cloud with speed radii about Track Points. You can see where the noise cloud is, as well as the 5 Points that would be consolidated.
Solution
See Smoothing Noise Clouds for how this is cleaned up.
Examples
Below are some examples of Noise Clouds that formed around camps in the Cordillera Blanca:


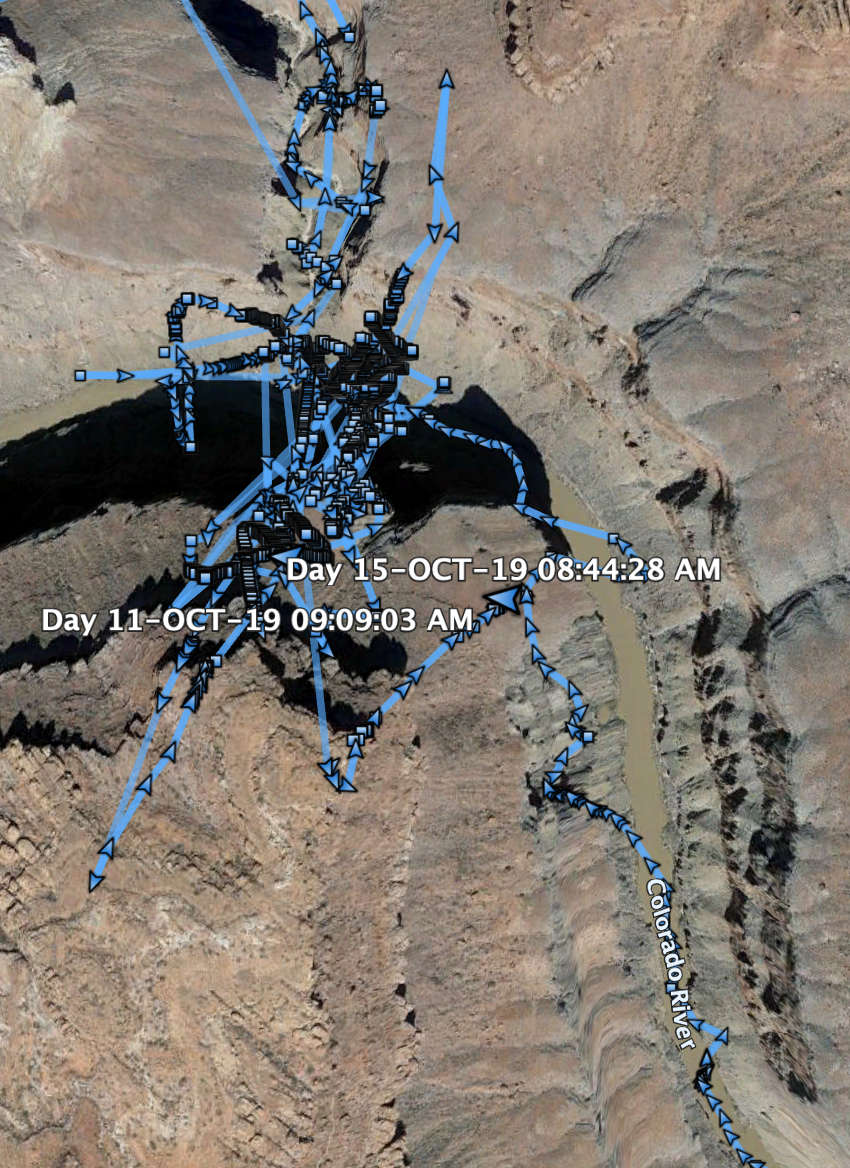
Below is another example from a packraft canyoneering trip in the Grand Canyon, where we floated down the Colorado River, slept at the mouth of 150-Mile Canyon, and continued up that side canyon the next day. Due to bad satellite reception, the noise cloud is quite obvious here!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}