Sections
Introduction
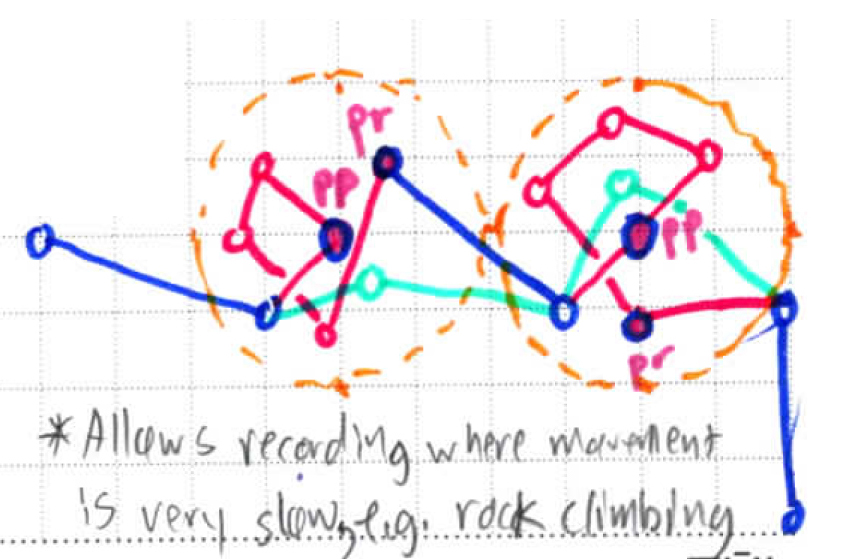
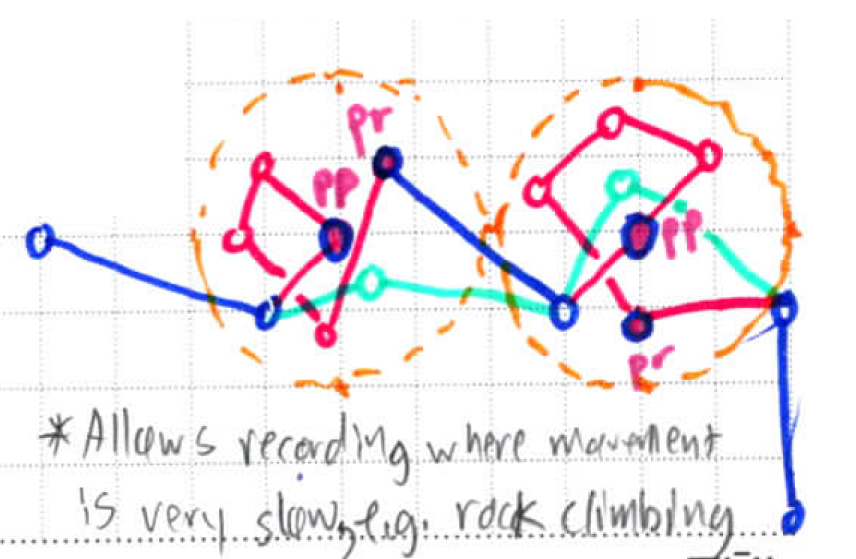
Some more complex uses of Track Smoothing can be used to address the Noise Cloud problem. This involves identifying & smoothing the Points that lie within a noise cloud, and replacing them with a pause Point & resume Point located at the average location of all points in the cloud.
The pause & resume times are for the first and last points within the cloud & are kept in order to track movements better between breaks.
Smoothing Operation
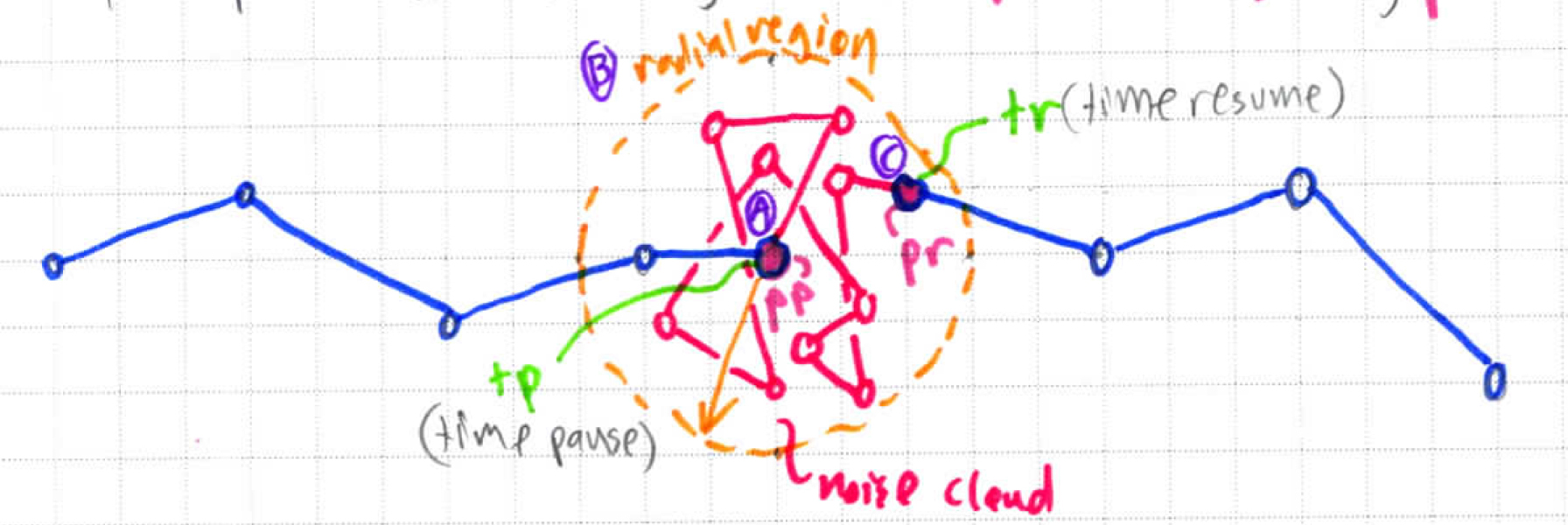
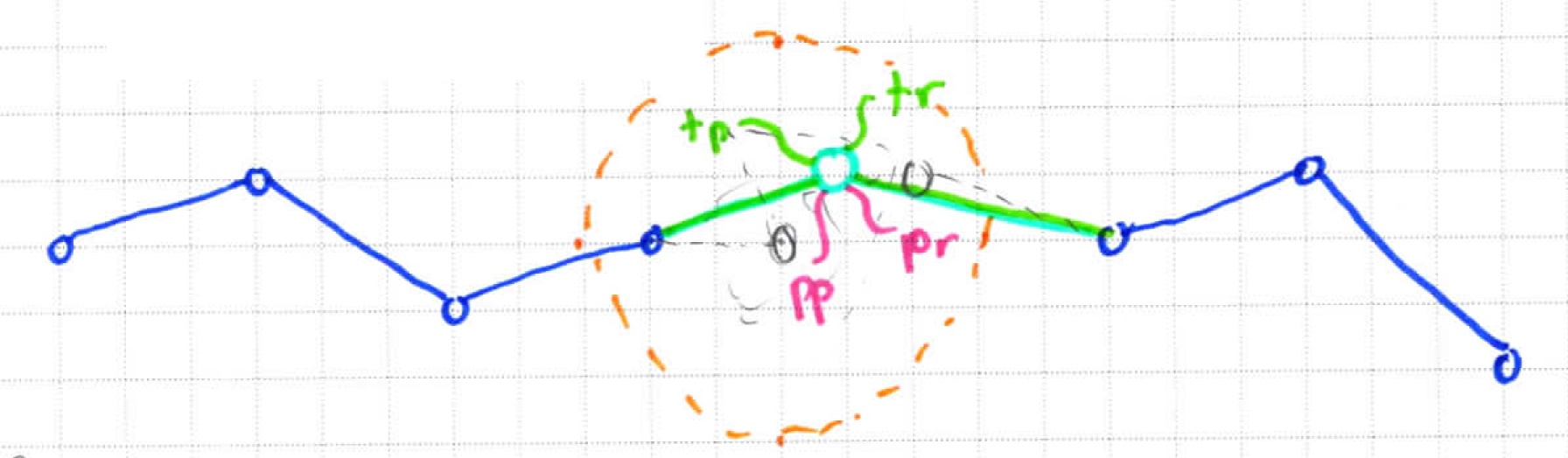
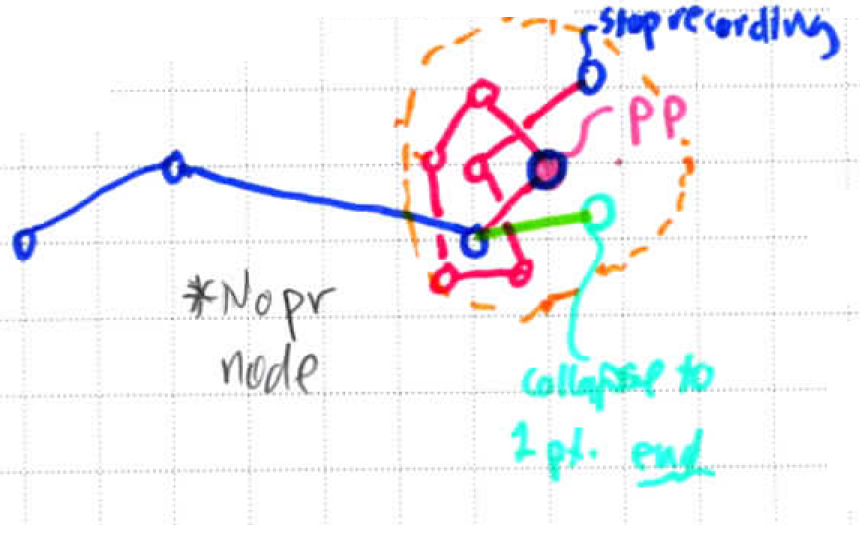
A. All Points from tp to tr are removed.
B. New pp & pr Points are determined as follows:
Timestamps correspond to the original pp & pr at tp & tr.
Points are positioned at the same lat/long, which is taken to be the average of all removed Points (A)
Cases
Below are the cases to consider for Noise Clouds:
Case 1 | Case 2 | Case 3 |
|---|---|---|
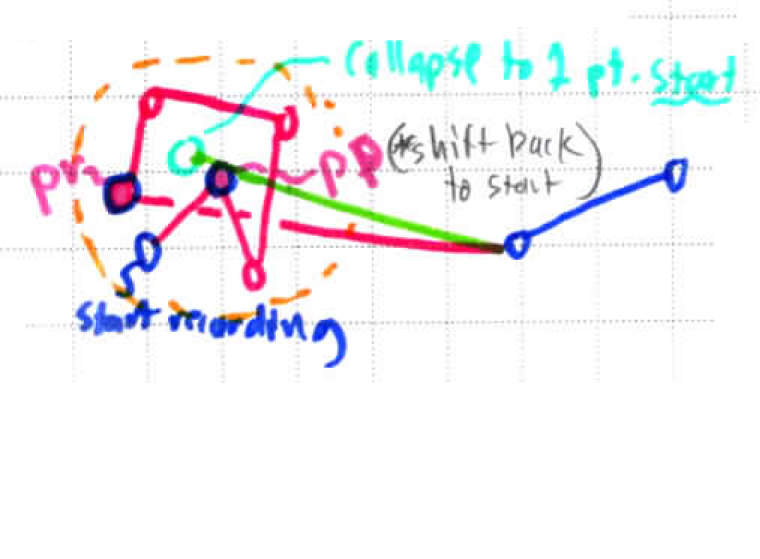
Cloud is at Track start | Cloud is at Track end | 1 or more clouds in middle |
 |  |  |
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}